-
AIRE Lab My research over the summer (May to September 2026) is about building a feedback-control system for an optical setup whose output intensity pattern changes over time due to thermal drifts in the medium that the light traverses through. The goal is to maintain a desired target intensity pattern at the detector plane. A Gaussian beam is phase-shaped by an SLM, passes through a drifting medium, propagates to a detector, and is corrected using feedback, and the controller only sees detector intensity images, not the hidden phase screen or complex optical field.
The physical idea is that thermal or environmental drift changes the refractive index of the medium, which introduces a phase perturbation on the beam. After propagation, that phase perturbation changes the interference pattern at the detector. In compact form, the chain is: thermal drift -> \(\Delta n(\mathbf{r},t)\) -> \(\Delta \phi(x,y,t)\) -> interference change -> \(I(x,y,t)\) drift.
In the first part of this project, I simplify the medium as an effective drifting phase screen \(\psi(x,y,t)\). This is not the final physical thermo-optical model; it is a controlled approximation used to test whether the RL-CNN controller can learn useful SLM corrections from intensity feedback. Later in the second part of this project, this can be replaced by a more physically grounded heat-equation or thermo-optic model.
The RL-CNN controller normalizes the detector image and compares it with the target image. The residual image is \(e_t(x,y)=\tilde{I}_t(x,y)-\tilde{I}_{\text{target}}(x,y)\). A short stack of recent residual images is passed into a CNN, which extracts spatial features from the error pattern. A PPO-based RL policy uses those features to output modal coefficients for an SLM phase correction. The SLM phase update is \(\Delta \phi_{\text{SLM}}(x,y,t)=\sum_m c_m(t) Z_m(x,y)\), and the SLM is updated incrementally as \(\phi_{\text{SLM}}(x,y,t+1)=\phi_{\text{SLM}}(x,y,t)+\Delta \phi_{\text{SLM}}(x,y,t)\).
Step-by-step system process
- Define the Gaussian input beam.
- Apply the SLM phase pattern.
- Apply the drifting medium / phase screen.
- Propagate the field to the detector plane.
- Measure the detector intensity.
- Compare the measured image with the target image.
- Form a residual image.
- Stack recent residual images.
- Pass the residual stack through the CNN.
- Use the PPO policy to choose modal coefficients.
- Convert the coefficients into an SLM phase update.
- Apply the update and repeat the loop.
In one sentence, the project is about using an RL-CNN feedback controller to learn SLM phase corrections from detector intensity images, so that an optical system can maintain a target output pattern even when the medium introduces time-varying phase drift.
-
Max Planck Institute for the Science of Light
In the summer of 2025, I performed research in Birgit Stiller's group at the Max Planck Institute for the Science of Light.
This summary covers May – August 2025 work on initially modelling and eventually testing an opto-electronic oscillator (OEO) that functions both as a low-noise microwave source and as a physical reservoir for machine-learning tasks. The OEO that I used is the Ikeda oscillator, a nonlinear feedback system that exhibits rich dynamics, including periodic, quasi-periodic, and chaotic behaviour. A picture of the Ikeda oscillator (source of which can be found in the following paper, Optoelectronic oscillators with time-delayed feedback) is shown below:

The feedback loop—nonlinear Mach-Zehnder modulation, fibre delay \(\tau\), small-signal amplification \(\beta\), and a narrow-band RF filter of inverse operator \(\hat H\)—reduces to the Ikeda-type delay-differential equation
\[ \hat H\bigl[x(t)\bigr]=\beta\,f_{\text{NL}}\!\bigl[x(t-\tau)\bigr]. \]
An image showing the converstion of the Ikeda oscillator form its actual form above to a simplifed block diagram is shown below (which can also be found in the paper referenced):

A MATLAB script implements every block explicitly: MZM intensity law, a delay, gain, and a band-pass filter whose bandwidth is adjustable. Iterating this chain with small Gaussian noise resolves start-up transients and captures steady-state behaviour.
Sweeping \(V_{\pi}\) and \(BW\) reveals four regimes—quiescent, periodic, quasi-periodic, and chaotic—mirroring classic Ikeda bifurcations. Utilizing the behaviour of the OEO allows us to simulate the behaviour of a Neural Network without back propagation. The model reproduces known OEO dynamics and offers a tunable platform for further reservoir-computing experiments.
After modelling and testing the OEO-based Neural Network on a variety of tasks ranging from time series prediction to classification, I decided to build and test the OEO experimentally with my supervisor. The experimentally built OEO, however, also includes Stimulated Brillouin Scattering (SBS) in the fibre delay line. SBS is a nonlinear optical effect that occurs when intense light interacts with acoustic phonons in a medium, leading to the generation of a backward-propagating Stokes wave. Simultaneously, I also tested the OEO-based Neural Network on the same tasks as before but with SBS included.
-
System-on-a-Chip Lab at UBC
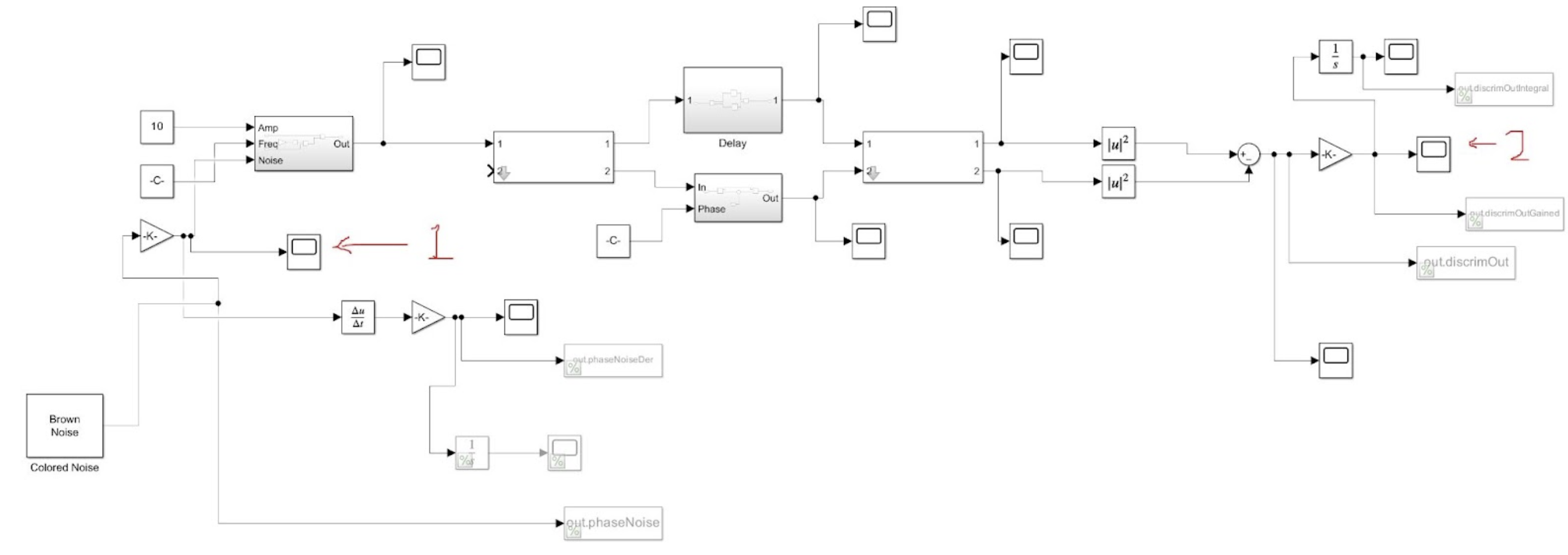
In the summer of 2024, I worked on two main projects; the first project involved simulating and then building and testing a frequency noise discriminator circuit utilizing an MZI (Mach-Zehnder interferometer). An MZI frequency noise discriminator circuit is used to detect and quantify frequency noise in optical communication and sensing systems. It works by splitting a coherent light source into two paths, allowing them to travel different lengths or undergo different phase modulations, and then recombining them to create an interference pattern. Frequency noise in the light source causes variations in the phase difference between the two paths, which results in changes in the interference pattern's intensity. Photodetectors measure these intensity variations, and signal processing techniques are used to analyze and quantify the noise. This method is crucial for improving the performance and precision of optical systems by mitigating the effects of frequency noise. The circuit schematic for the frequency noise discriminator circuit in Simulink is shown below (the numbers 1 and 2 in red are used to show the input and output measurements, respectively):
The second project involved creating several programs in MATLAB dealing with the relationship between the Frequency Noise PSD of a laser and its lineshape. The Frequency Noise PSD describes the power spectrum of the noise within a laser as a function of frequency, while the lineshape of a laser shows the intensity of the output laser as a function of frequency and is thus a good metric for measuring the quality of the laser. An algorithm exists that, given the Frequency Noise PSD of a laser, can calculate the lineshape of the laser. The algorithm is as follows; given the Frequency Noise PSD of a laser, \(S_{\delta \nu}(f)\), of the laser lightfield:
\(E(t)=E_0e^{i(2\pi \nu_0 t +\phi (t))}\)
where \(\nu_0\) is average frequency value, \(\phi (t)\) is the phase noise, and \(E_0\) is the amplitude, we can find the autocorrelation function of the lightfield, \(\Gamma (\tau) = E^{*}(t)E(t+\tau)\). The explicit expression of the autocorrelation function is:
\( \Gamma_E(\tau) = E_0^2 e^{i 2 \pi \nu_0 \tau} e^{-2 \int_{0}^{\infty} S_{\delta \nu}(f) \frac{\sin^2(\pi f \tau)}{f^2} \, df} \)
Once we have our autocorrelation function, \(\Gamma (\tau)\), we can find the laser lineshape, \(S_E(\nu)\), by taking the fourier transform of the autocorrelation function.
\(S_E(\nu) = 2 \int_{-\infty}^{\infty} \Gamma_E(\tau) e^{-i 2 \pi \nu \tau} \, d\tau\)
The main problem is that for the vast majority of possible functions for \(S_{\delta \nu}(f)\), we cannot yield an analytical solution for the lineshape. Thus, the bulk of the work that I did for this specific project was creating numerical algorithms that can approximate the lineshape for a various functions of \(S_{\delta \nu}(f)\) and analyzing how quantifiable changes in the Frequency Noise PSD affect the lineshape. My work for this specific project is summarized in the following report:
-
TRIUMF
In the summer of 2022, I was performing research in the field of \(\mu \)SR (muon Spin Resonance) in the CMMS (Centre for Molecular and Material Science) at TRIUMF. Before I delve directly into what \(\mu \)SR is, it is important to introduce what muons are and how we generate them.
Muons are elementary particles similar to electrons (same spin and charge) but with a mass roughly 207 times as large. To generate muons in a lab, we need to first generate pions, a type of meson composed of a quark and an antiquark. We do this by firing a proton beam at a target usually made of graphite or beryllium.
\(p+p \rightarrow p+n+\pi^+\)
\(p+n \rightarrow n+n+\pi^+\)
Because pions are an unstable particle, a charged pion has a mean lifetime of about \(\tau = 26\text{ ns}\) and will decay into an antimuon (a positively charged muon) and a neutrino:
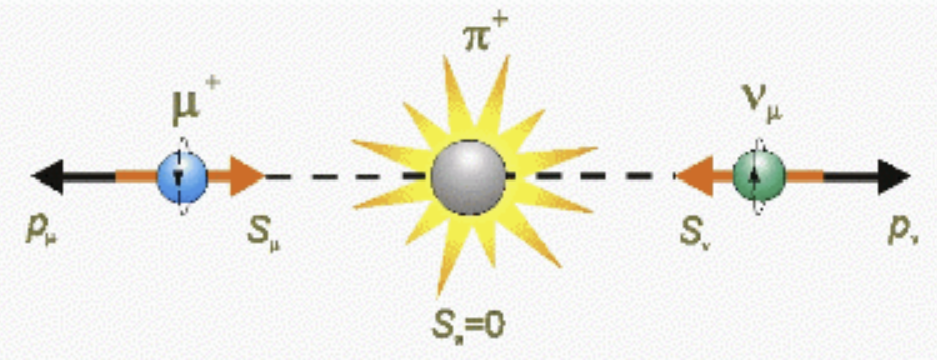
\(\pi^+ \rightarrow \mu^+ + \nu_\mu\)
Here is the interesting part. So far, only left-handed neutrinos (neutrinos with a spin antiparallel to their linear momentum) exist. We also know that pions have no spin. Therefore, due to conservation of momentum, both the antimuon and neutrino are produced with a spin antiparallel to their linear momentum in the pion rest frame. A diagram of such a process is shown below:
Once we have our antimuons, we can use them to perform mu-SR. The essence of mu-SR is that we take a sample (usually made of aluminium, carbon, or silver) and bombard it with the generated antimuons. The antimuons will then stop in the sample and precess about the local magnetic field. The precession frequency is given by:
\(\omega = \gamma B\)
where \(\gamma \) is the gyromagnetic ratio of the muon and \(B\) is the local magnetic field. By measuring the time evolution of the antimuon polarization, we can extract information about the local magnetic field at the sample. This is useful for studying magnetic materials and understanding the magnetic properties of materials.
However, the process does not end there. Antimuons have a mean lifetime of \(\tau = 2.2\text{ }\mu \text{s}\) and will eventually decay into a positron, an electron neutrino, and a muon antineutrino:
\(\mu^+ \rightarrow e^+ + \nu_e + \bar{\nu}_\mu\)
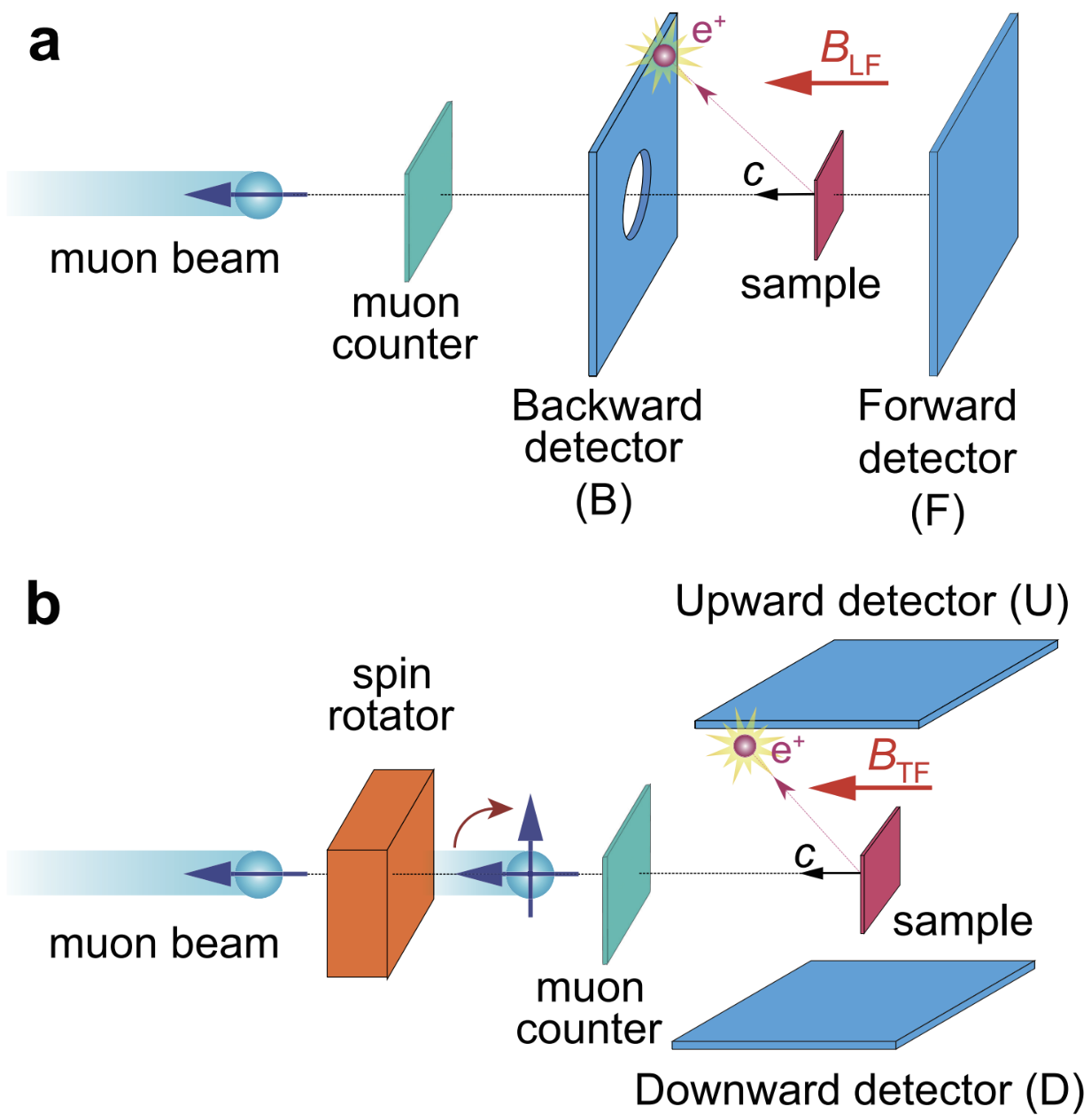
The bulk of my research involved using G4beamline for designing and simulating a variety of detector setups for the \(\mu \)SR experiment and then eventually testing them. The detector setups consisted of a series of photomultiplier tubes (PMTs) and scintillators that would detect the positrons emitted from the antimuon decay. We would detect both the time and position of the positron emission in order to learn more about the antimuon decay process, as well as the spin precession of the antimuons. A conceptual example of a detector setup is shown below:
Some of my work, which includes both a report detailing the simulations and results as well as a conference poster is shown below:
Here is a link for my interview with TRIUMF: TRIUMF Interview